近日,我校机电工程学院沈刚教授团队在国际顶尖期刊《IEEE Transactions on Industrial Electronics》上发表了题为“Disturbance-Rejection-Based Adaptive RISE Control for an n-DOF Electro-Hydraulic Manipulators with Structural Nonlinearity”的研究论文,《IEEE Transactions on Industrial Electronics》五年影响因子7.8,是工业电子领域的权威期刊(中科院工程技术大类一区Top期刊),在工业控制、机电系统等方向具有极高的学术影响力。据悉,这是我校机电工程学院首次以第一完成单位在此期刊上发表学术研究型论文。
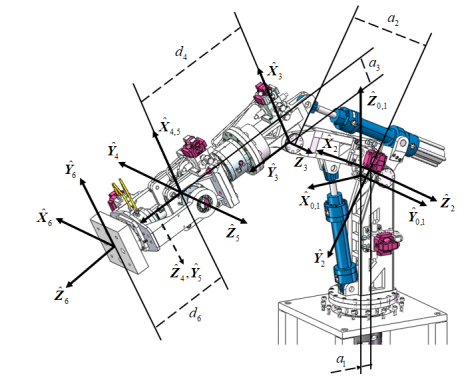
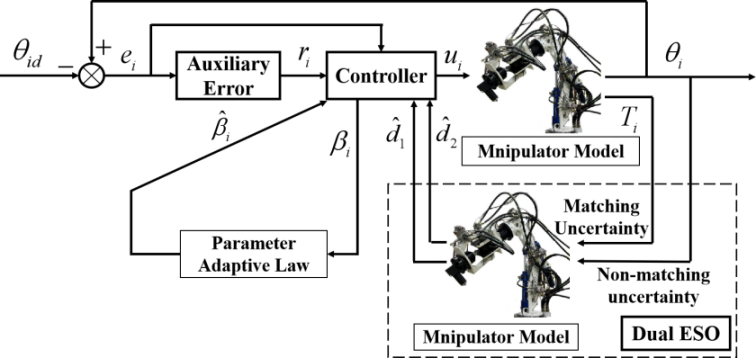
液压机械臂构型与控制流程图
机械臂是重载作业场景(如煤炭开采、工程作业)的核心装备,其多自由度运动控制精度直接决定作业效率与安全性。液压机械臂突出存在建模误差、外部扰动及结构非线性等问题,传统控制方法难以满足高精度跟踪需求。沈刚教授团队在该论文中,提出一种基于抗扰的自适应控制技术,通过设计双扩张状态观测器精准估计并补偿外部扰动,结合自适应算法优化控制器参数,有效解决了多自由度液压机械臂的高精度控制难题,为多自由度液压机械臂高精度控制提供了新方案。
该团队长期从事重载复杂装备的智能非线性控制、故障诊断、能量优化以及液压系统的设计、分析等方面的科研工作,先后主持国家自然科学基金、联合基金重点项目、国家重点研发计划课题、联合基金培育项目等基金、项目多项,相关研究成果多次发表在《IEEE/ASME TransactionsMechatronics、Mechatronics》《Control Engineering Practice》《IEEE TransactionsIndustrial Electronics》《Mechanism and Machine Theory》《Nonlinear Dynamics》《ISA Transactions》等国际顶尖期刊,为学校在该领域的国际学术影响力持续提供有力支撑。
机电工程学院青年教师米君杰为该论文第一作者,同时南京理工大学、南京邮电大学以及南京林业大学相关科研团队在研究过程中均作出重要贡献。该研究得到了国家自然科学基金项目、安徽理工大学高层次人才科研启动基金项目、煤炭无人化开采数智技术全国重点实验室开放基金项目的联合资助。




