近日,我校电气与信息工程学院朱洪波副教授团队在无线传感网络WSN和移动目标(移动机器人)间的协作定位研究中取得重要进展,在国际物联网领域顶级学术期刊IEEE Internet of Things Journal(IF = 10.238,JCR Q1,中科院一区,双一区Top期刊)上发表了题为《Adaptive Event-Driven Robust Set-Membership Estimation for Received-Signal-Strength-Based Moving Targets Localization》的研究论文。
环境自适应事件驱动机制
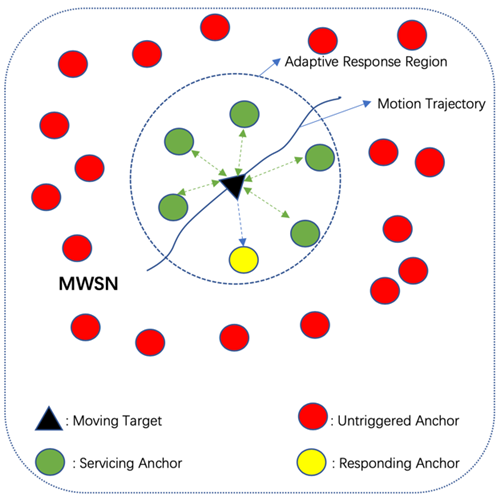
为解决无线传感设备和移动目标(如移动机器人)间协作定位时通信负担重、远距离通信不确定性程度高和计算资源需求大问题,实现高能效、计算复杂度低和鲁棒性好的WSN与移动目标间的协作定位,该论文提出了一种基于集员滤波架构和事件驱动机制的环境自适应事件驱动鲁棒集员融合估计AERSFE方法,用于在运动建模和测量不确定性下基于接收信号强度RSS的移动目标定位或跟踪。与传统事件触发机制的集员滤波方法相比,该论文提出的方法在能效性、通信负担、计算复杂度和定位性能等方面具有显著优势。此外,与传统的定位或跟踪方法相比,该论文对非线性测量模型且包含测量不确定性的拉格朗日余量进行了精确估计,进一步提高了移动目标运动状态的估计性能。根据区间分析理论、线下不等式LMI和解耦技术,通过融合移动目标附近已触发锚点的接受信号强度RSS测量数据,该论文构建了计算复杂度低的环境自适应事件驱动鲁棒集员融合估计AERSFE迭代递归公式。最后,在仿真及实验装置上进行了大量的方法验证,验证结果表面该论文所提出的方法在保证移动目标定位或跟踪性能的前提下,在能效性、通信负担和计算复杂度方面具有一定的优越性。该研究为移动目标(如移动机器人)在无GPS信号环境下的导航与定位技术提供了新思路。
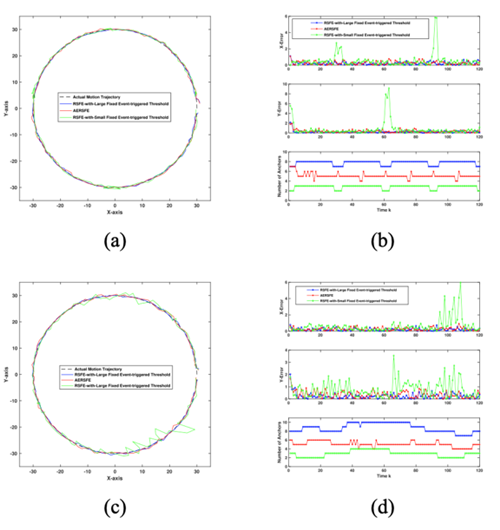
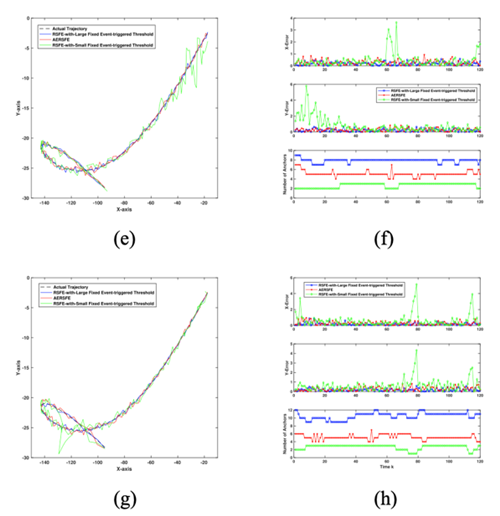
AERSFE方法实验验证数据(摄影:朱洪波)
安徽理工大学为该论文的第一完成单位,电气与信息工程学院朱洪波副教授为该论文的第一作者兼通讯作者。该研究工作得到了国家自然科学基金青年项目(No.62003001)、安徽省自然科学基金青年项目(No.2008085QF298)、安徽省教育厅自然科学研究重点项目(No.KJ2019A0104)和安徽理工大学青年托举人才项目等资助。
据悉,朱洪波副教授主要从事移动机器人定位、导航、运动规划及控制、无线传感网络WSN信息融合、WSN与移动机器人间的协作定位方面的科研工作,先后主持国家自然科学基金、安徽省自然科学基金及安徽省教育厅自然科学研究重点项目等基金项目。在《IEEE Internet of Things Journal》《IEEETransactions on Instrumentation and Measurement》《Journal of Bionic Engineering》等国内外高质量期刊发表论文多篇,入选安徽理工大学“青年托举人才项目”。




